| | | Monture à charge hyper(pas)lourde! |    |
| | Auteur | Message |
|---|
gerard33
Membre


 Messages : 3244 Messages : 3244
Date d'inscription : 29/07/2009
Localisation : Bommes
Humeur : mauvaise
 |  Sujet: Monture à charge hyper(pas)lourde! Sujet: Monture à charge hyper(pas)lourde!  Ven 01 Fév 2019, 09:42 Ven 01 Fév 2019, 09:42 | |
| j'ai plein de chutes dans l'atelier, de l'alu, du comacel, de la visserie, des moteurs, des arduinos....tout ça pas facile de transporter et de sortir l'HEQ5 pour y mettre juste un appareil photo dessus, c'est lourd et encombrant alors, j'ai pris le taureau par les cou... par les cornes et avec toutes les chutes, j'ai décidé de me faire une mini-monture la bête repliée:  ça pèse 700 grammes sans les piles 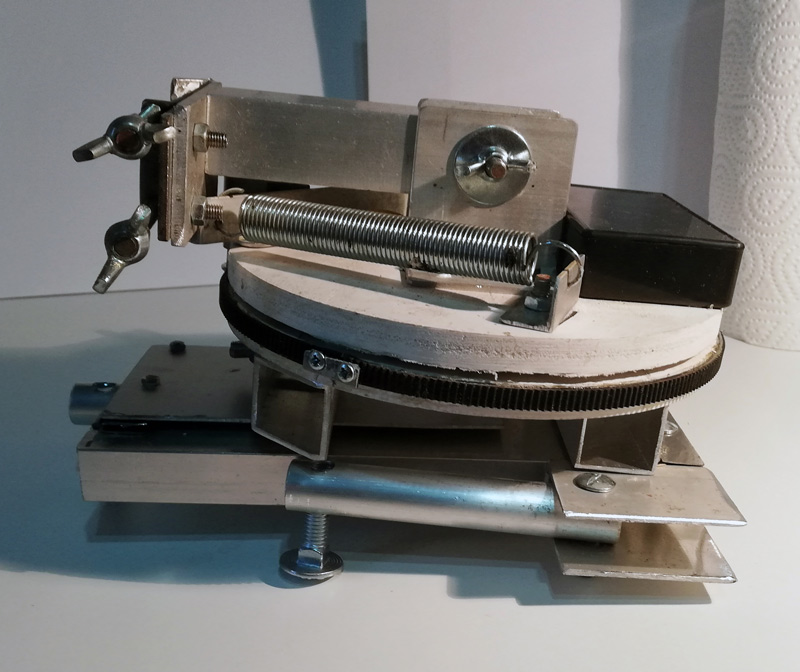 ensuite, on déplie la bête! les pieds latéraux d'abord 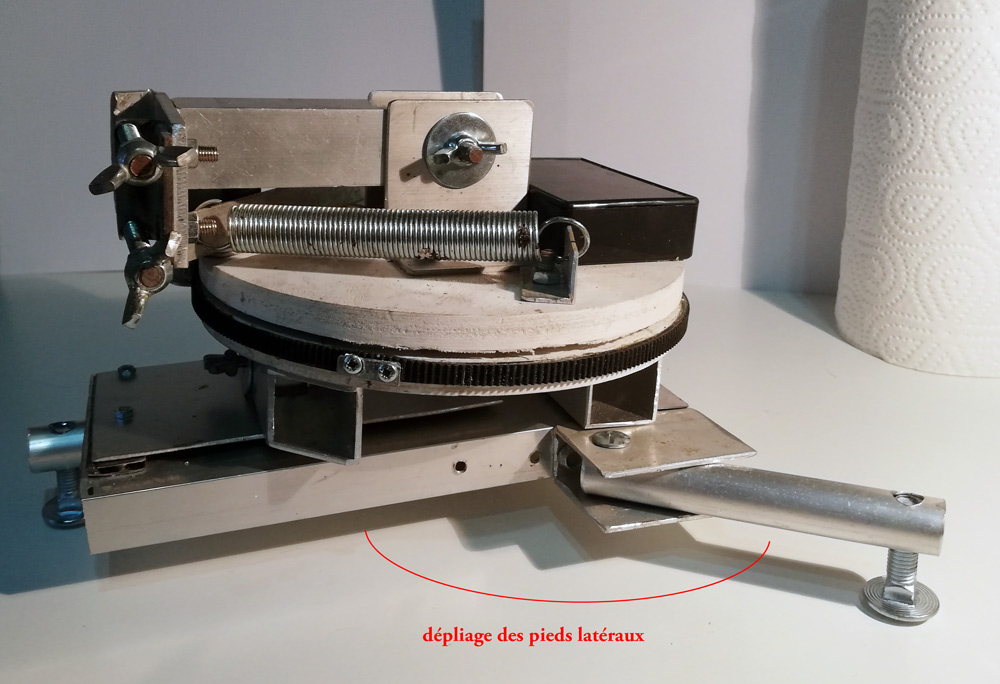 puis le support avant qui se règle à la latitude du lieu 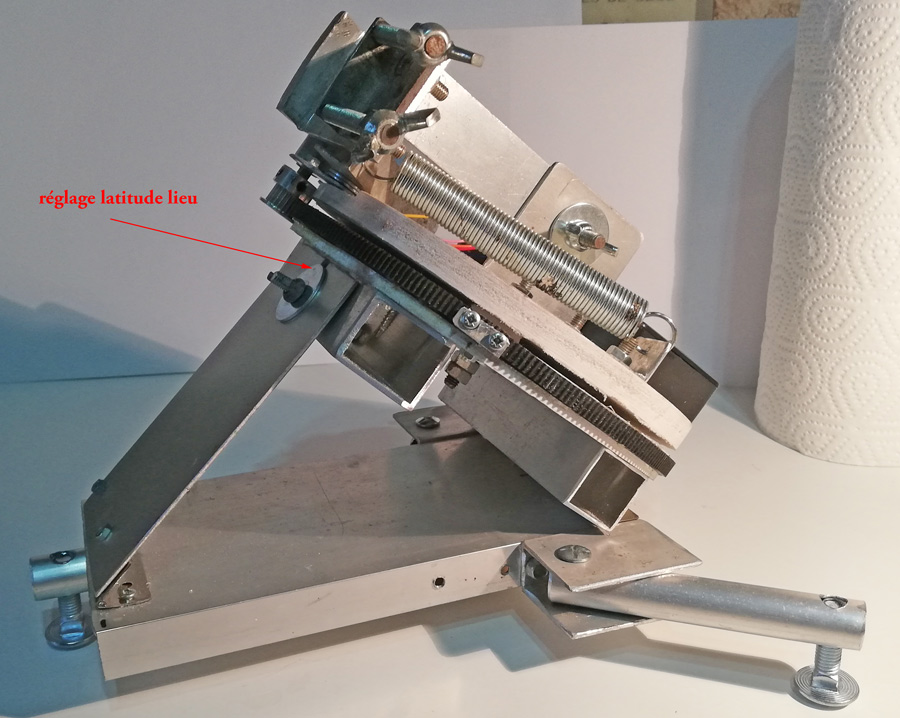 et voui, c'est une équatoriale!! on déplie le mât 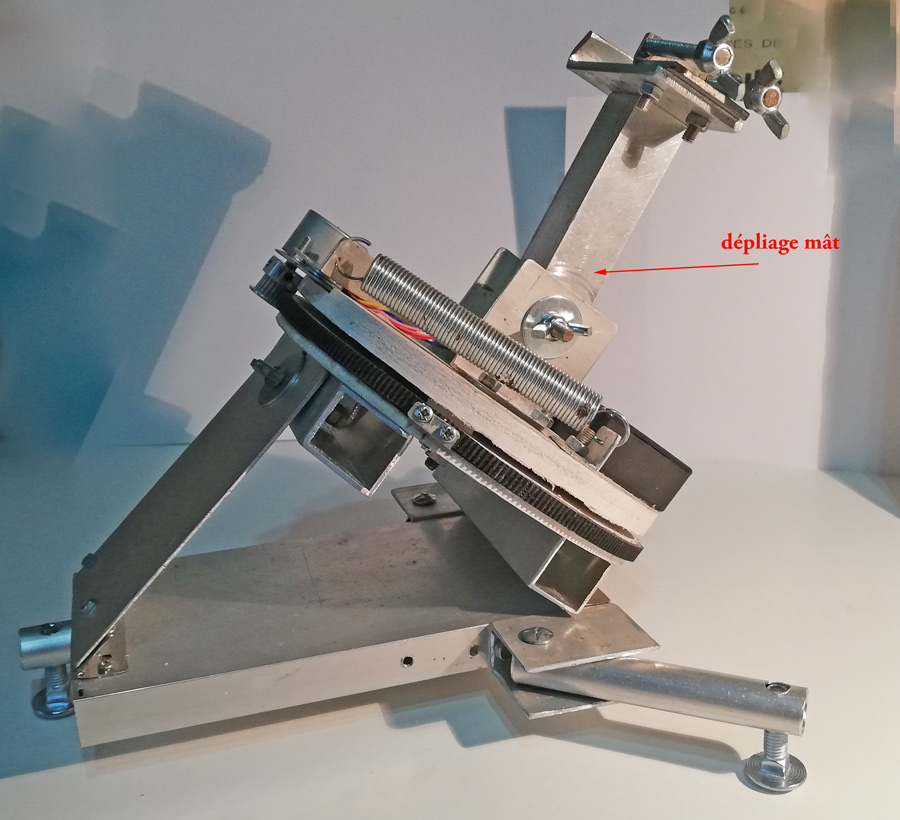 sans déconner, ça rappelle pas Curiosity?? incroyable non!  la queue d'aronde  le système d'entrainement  la boite magique avec l'arduino et la carte moteur 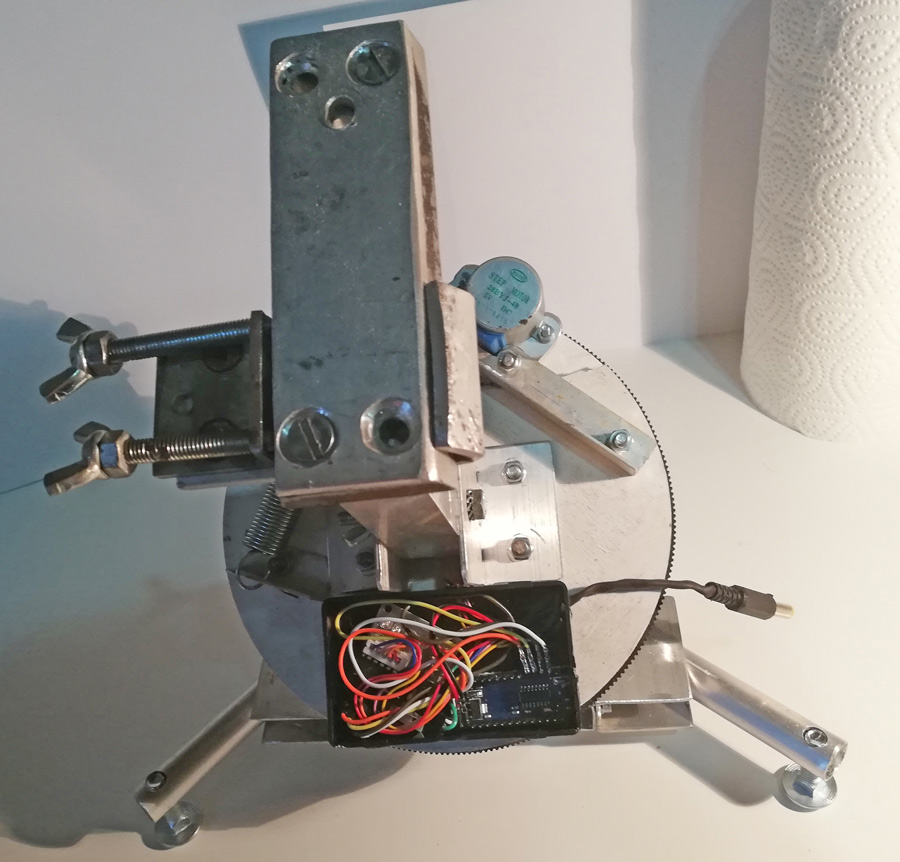 impressionnant la qualité du câblage non? eh si  débrayage: 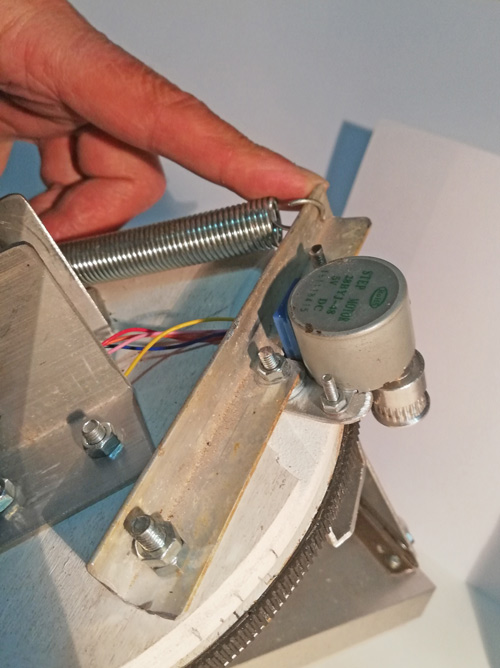 embrayage  simple n'est-il pas? le schéma d'une simplicité....pffftttt 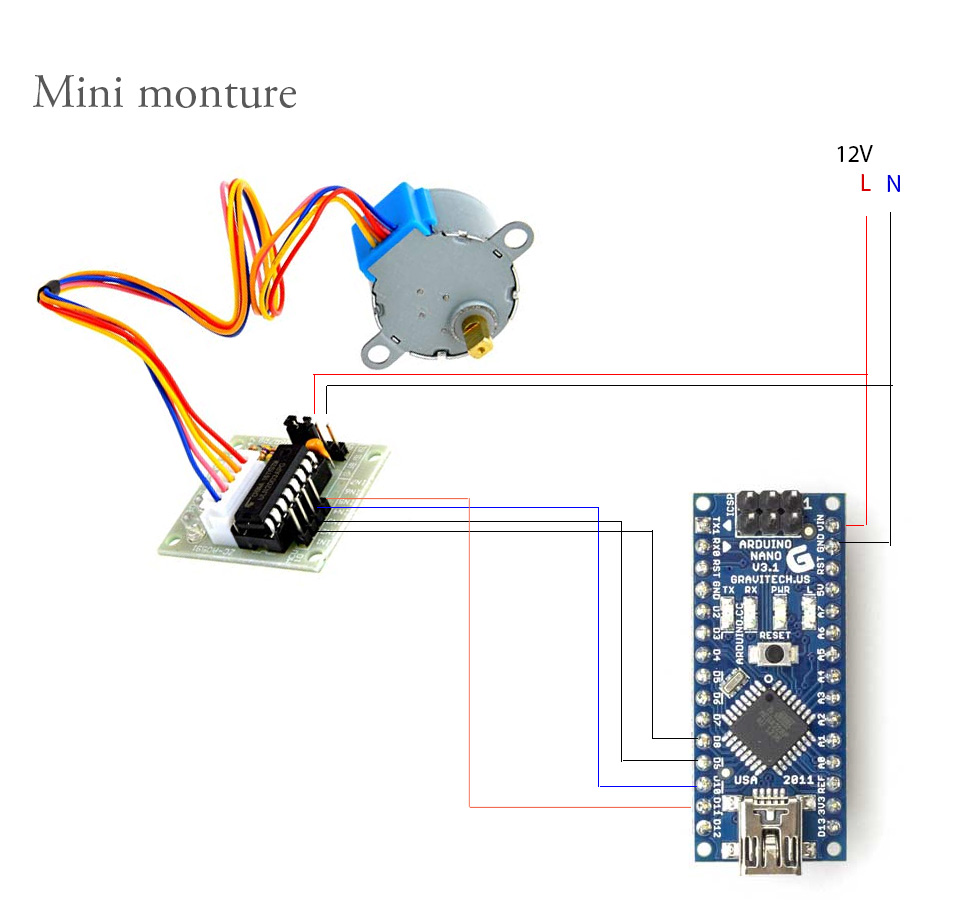 le code arduino - Citation :
- #include <Stepper.h>
#define STEPS 100
#include "Timer.h"
const int stepsPerRevolution = 64;//32*64;
//Créer une instance de la classe stepper
//Le moteur (fils 1 2 3 4) est branché sur les sorties 8 9 10 11 de l'Arduino (et sur GND, +V)
Stepper moteur(stepsPerRevolution, 8, 10, 9, 11); // Sens horaire
// Stepper small_stepper(STEPS, 11, 10, 9,  ; // Sens anti-horaire en inversant 8 et 11 (si on préfère) ; // Sens anti-horaire en inversant 8 et 11 (si on préfère)
int Steps2Take = 0; //Nombre de pas de rotation demandé au moteur
Timer avance;
//************************************************************
// Pour un moteur de ce type : http://tiptopboards.com/151-moteur-pas-%C3%A0-pas-r%C3%A9duct%C3%A9-de-5v-4-fils-driver-.html
// 64 pas par tour, 4 phases, angle de 5.625° selon les spécifications du moteur
// Démultiplication 1:64 pour ce moteur réducté mécaniquement
// 360° / 5.625° * 64 = 4096 angles avec la démultiplication
// 360° / 5.625° * 64 * 4 bobines / 2 bipolaire = 2048 step / tour
void setup()
{
Serial.begin(9600); // 9600 bps
moteur.setSpeed(10);
Steps2Take = 1;
avance.every(2810, enavant2);
}
void loop()
{
avance.update();
}
void enavant2()
{
pinMode(8,HIGH);
pinMode(9,HIGH);
pinMode(10,HIGH);
pinMode(11,HIGH);
moteur.step(-Steps2Take);
delay (100);
pinMode(8,LOW);
pinMode(9,LOW);
pinMode(10,LOW);
pinMode(11,LOW);
}
il suffit de brancher une batterie ou ensemble de piles de 12V et ça marche tout seul enjoye  détails pour les pieds c'est juste un écrou de 8 inséré en force dans un tube alu de 16, ça rentre pile poil 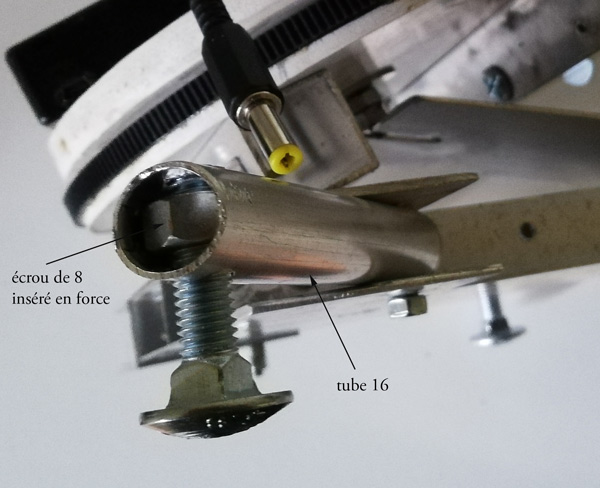 on la met en station (j'ai pensé avec un laser posé sur le plateau dirigé vers la polaire, ça doit suffire) on branche les piles et ça suit  Atik 383 sur newton 200/1000__NEQ6 sur pilier (poste fixe)__autoguidage DSI2 sur MAK 100__moi 
Dernière édition par gerard33 le Ven 01 Fév 2019, 12:54, édité 1 fois |
|  | | RIGEL
Modérateur


 Messages : 26061 Messages : 26061
Date d'inscription : 14/07/2009
Age : 56
Localisation : L'espace... l'ultime frontière !
Emploi/loisirs : Astronomie, astrophoto
Humeur : Amoureuse !
| | Sujet: Re: Monture à charge hyper(pas)lourde! Ven 01 Fév 2019, 12:19 | |
| Impressionnant  |
| | | | AnaximAndre
Membre

Messages : 686
Date d'inscription : 12/04/2015
Age : 75
Localisation : 33770 Salles
Emploi/loisirs : Astro & bricolage
Humeur : Grand débutant besoin de ruban fluo
| | Sujet: Si tu as besoin de pièces 3D Dim 03 Fév 2019, 12:31 | |
| Si tu as besoin de pièces 3D, avec le code .stl, cela va plus vite,
je peux te les imprimer avec plaisir
pourquoi avec le code .STL :
Je ne sais pas encore utiliser FreeCad de façon opérationnelle, je suis en apprentissage !!! |
| | | | astroJB
Modérateur

Messages : 1053
Date d'inscription : 14/07/2009
Age : 45
Localisation : Cognac
Emploi/loisirs : Astrophotographie
Humeur : Après Bordeaux, Cognac... Hips!
| | Sujet: Re: Monture à charge hyper(pas)lourde! Lun 04 Fév 2019, 17:33 | |
| beau boulot, respect Mooosieur!! merci pour les schémas explicatifs, çà peut être un truc qui m'intéresse... seul souci çà sera quand j'aurai le temps (c'est à dire en 2023  ) |
| | | | AnaximAndre
Membre
Messages : 686
Date d'inscription : 12/04/2015
Age : 75
Localisation : 33770 Salles
Emploi/loisirs : Astro & bricolage
Humeur : Grand débutant besoin de ruban fluo
| | Sujet: dimensions Lun 04 Fév 2019, 18:42 | |
| Hello, tu peux nous en dire plus sur le diamètre du disque ?
Cela doit rentrer en ligne de compte pour la vitesse de suivi non ?
Si j'ai bien compris tu as collé, de la courroie d'imprimante,
avec une poulie idoine de ce genre de matériel ? |
| | | | gerard33
Membre
Messages : 3244
Date d'inscription : 29/07/2009
Localisation : Bommes
Humeur : mauvaise
| | Sujet: Re: Monture à charge hyper(pas)lourde! Mer 20 Fév 2019, 06:36 | |
| Des nouvelles du monstre de puissance! le mât a été raccourci et complété d'une rotule (l'APN étant plus lourd que la monture, il fallait pouvoir centrer la charge)  à noter le superbe support point rouge imprimé par le fablab d'AG33!! le code a un peu changé - Code:
-
#include <Stepper.h>
#define STEPS 100
#include "Timer.h"
const int stepsPerRevolution = 48*64;
int intervalle=3260;
//Le moteur (fils 1 2 3 4) est branché sur les sorties 8 9 10 11 de l'Arduino (et sur GND, +V)
Stepper moteur(stepsPerRevolution, 8, 10, 9, 11);
int Steps2Take = 1; //Nombre de pas de rotation demandé au moteur
Timer avance;
void setup()
{
moteur.setSpeed(9);
avance.every(intervalle, enavant2);
}
void loop()
{
avance.update();
}
void enavant2()
{
pinMode(8,HIGH);
pinMode(9,HIGH);
pinMode(10,HIGH);
pinMode(11,HIGH);
moteur.step(-Steps2Take);
delay (100);
pinMode(8,LOW);
pinMode(9,LOW);
pinMode(10,LOW);
pinMode(11,LOW);
} et ça marche bon, faut pas non plus monter en focale mais pour la Voie Lactée c'est bon Atik 383 sur newton 200/1000__NEQ6 sur pilier (poste fixe)__autoguidage DSI2 sur MAK 100__moi |
| | | | RIGEL
Modérateur
Messages : 26061
Date d'inscription : 14/07/2009
Age : 56
Localisation : L'espace... l'ultime frontière !
Emploi/loisirs : Astronomie, astrophoto
Humeur : Amoureuse !
| | Sujet: Re: Monture à charge hyper(pas)lourde! Mer 20 Fév 2019, 09:54 | |
| Magnifique... quel talent ce Gérard Et merci pour toutes les flèches rouges  |
| | | | AnaximAndre
Membre
Messages : 686
Date d'inscription : 12/04/2015
Age : 75
Localisation : 33770 Salles
Emploi/loisirs : Astro & bricolage
Humeur : Grand débutant besoin de ruban fluo
| | Sujet: autres questions Mer 20 Fév 2019, 10:14 | |
| comment est réalisé l'axe de rotation ?
comment est assuré le glissement entre support et secteur en rotation ?
A quoi sert l'instruction time delay sur la fin du programme ? |
| | | | gerard33
Membre
Messages : 3244
Date d'inscription : 29/07/2009
Localisation : Bommes
Humeur : mauvaise
| | Sujet: Re: Monture à charge hyper(pas)lourde! Mer 20 Fév 2019, 11:00 | |
| - Andre33 a écrit:
- comment est réalisé l'axe de rotation ?
comment est assuré le glissement entre support et secteur en rotation ?
A quoi sert l'instruction time delay sur la fin du programme ? les deux cercles sont en comacel (PVC léger type panneaux pub) axés avec vis + écrou nilstop non bloqué le supérieur glisse sur 3 patins téflon le delay n'est pas à la fin de la fonction: - Code:
-
pinMode(8,HIGH); // le moteur est excité
pinMode(9,HIGH); // "
pinMode(10,HIGH); // "
pinMode(11,HIGH); // "
moteur.step(-Steps2Take); // il effectue un tour
delay (100); //on lui laisse le temps d'effectuer ce tour
pinMode(8,LOW); // on le met au repos
pinMode(9,LOW); // "
pinMode(10,LOW); // "
pinMode(11,LOW); // " si on ne le met pas au repos, il reste excité et il chauffe beaucoup avec un délai de 100/1000 de s, il ne chauffe pas du tout cela pourrait être sans doute rabaissé, mais à quoi bon? Atik 383 sur newton 200/1000__NEQ6 sur pilier (poste fixe)__autoguidage DSI2 sur MAK 100__moi |
| | | | giti
Membre
Messages : 3719
Date d'inscription : 10/09/2009
Age : 62
Localisation : Canéjan
| | | | | Contenu sponsorisé
| | Sujet: Re: Monture à charge hyper(pas)lourde! | |
| |
| | | | |
Sujets similaires |  |
|
| | Permission de ce forum: | Vous ne pouvez pas répondre aux sujets dans ce forum
| |
| |
| |